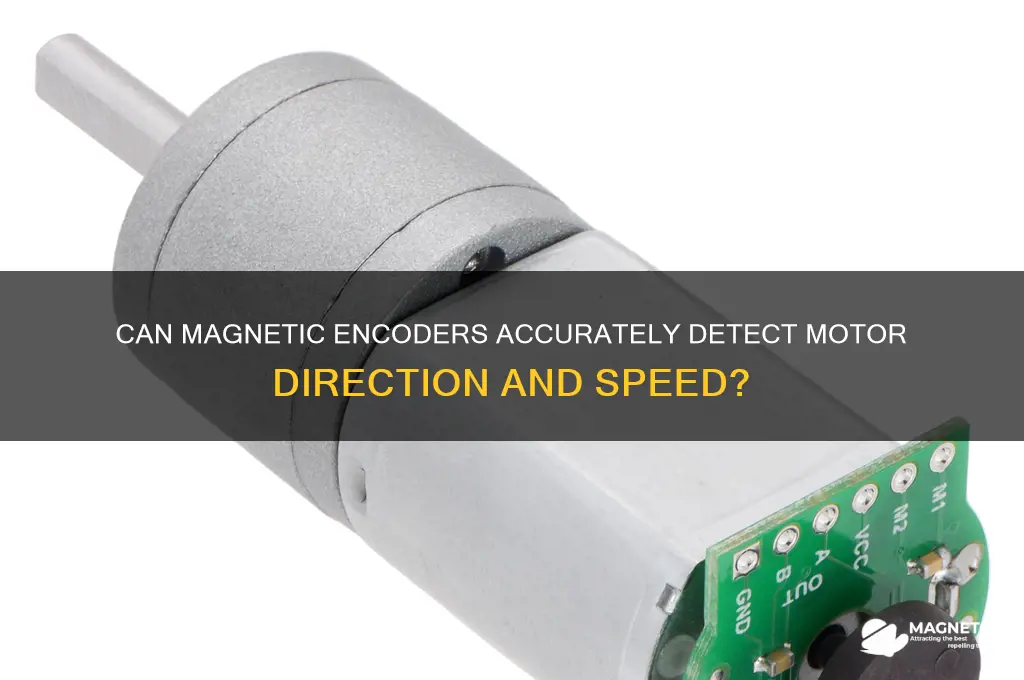
Magnetic encoders are widely used in motor control systems to provide precise position and speed feedback, but their ability to detect motor direction is a critical aspect of their functionality. These encoders operate by sensing changes in magnetic fields generated by a magnet attached to the motor shaft, translating these changes into electrical signals that can be interpreted by a controller. By analyzing the sequence and polarity of these signals, magnetic encoders can accurately determine whether the motor is rotating clockwise or counterclockwise. This capability is essential for applications requiring bidirectional control, such as robotics, CNC machines, and automotive systems, where knowing the motor’s direction ensures proper operation and prevents errors. Thus, magnetic encoders not only measure position and speed but also play a vital role in detecting and controlling motor direction.
| Characteristics | Values |
|---|---|
| Direction Detection Capability | Yes, magnetic encoders can detect motor direction. |
| Principle of Operation | Utilizes magnetic field changes to determine rotor position and speed. |
| Accuracy | High accuracy in detecting both clockwise (CW) and counterclockwise (CCW) rotation. |
| Resolution | Depends on the encoder design; typically high resolution (e.g., 12-16 bits). |
| Response Time | Fast, with minimal latency in detecting direction changes. |
| Immunity to Environmental Factors | Resistant to dust, dirt, and moisture, ensuring reliable operation. |
| Contactless Operation | Yes, no physical contact between sensor and target, reducing wear. |
| Power Consumption | Low power consumption compared to optical encoders. |
| Temperature Range | Operates effectively in a wide temperature range (-40°C to +125°C). |
| Applications | Widely used in automotive, industrial automation, robotics, and consumer electronics. |
| Cost | Generally cost-effective compared to optical encoders. |
| Size and Integration | Compact and easy to integrate into motor systems. |
| Signal Output | Typically provides digital output (e.g., quadrature signals) for direction and position. |
| Durability | Long lifespan due to lack of moving parts and robust construction. |
Explore related products






What You'll Learn
- Encoder Signal Polarity: How signal polarity changes indicate motor direction in magnetic encoders
- Quadrature Encoding: Using A and B channels to determine direction in magnetic encoders
- Magnetic Field Orientation: Detecting direction via changes in magnetic field alignment
- Resolution Impact: How encoder resolution affects direction detection accuracy
- Direction Algorithms: Software methods to interpret encoder data for motor direction
![]()
Encoder Signal Polarity: How signal polarity changes indicate motor direction in magnetic encoders
Magnetic encoders leverage the principle of signal polarity changes to determine motor direction, a critical function in applications requiring precise motion control. At the heart of this mechanism lies the interaction between a magnetized rotor and a sensor array. As the rotor rotates, its magnetic poles induce alternating polarity shifts in the sensor signals. These shifts are not random; they follow a predictable pattern that directly correlates with the direction of rotation. For instance, a clockwise rotation might generate a sequence of positive-to-negative transitions, while a counterclockwise rotation reverses this sequence. Understanding this polarity behavior is essential for decoding directional information from encoder outputs.
To interpret signal polarity changes effectively, consider the encoder’s quadrature output, which typically consists of two channels (A and B) with a 90-degree phase shift. The relative timing of these channels’ polarity transitions determines direction. If Channel A leads Channel B in transitioning from positive to negative, the motor is moving in one direction; if Channel B leads, the direction is reversed. This method, known as the "AB phase comparison," is a standard technique in magnetic encoders. For example, in a 12-pole encoder rotating at 600 RPM, the polarity transitions occur at precise intervals, allowing real-time direction detection with minimal latency.
Practical implementation requires careful calibration to ensure accurate polarity interpretation. Environmental factors like temperature fluctuations or magnetic interference can skew signal readings, leading to false direction detection. Shielding the encoder and using temperature-compensated sensors can mitigate these issues. Additionally, software algorithms should include error-checking routines to validate polarity patterns against expected sequences. For instance, a discrepancy in the phase shift between Channels A and B could indicate sensor misalignment or damage, triggering a diagnostic alert.
A comparative analysis of magnetic encoders versus optical encoders highlights the advantages of polarity-based direction detection. Optical encoders rely on light interruption patterns, which can be susceptible to dust or debris. Magnetic encoders, however, operate contactless and are inherently more robust in harsh environments. Their ability to detect direction through polarity changes makes them ideal for industrial applications, such as conveyor systems or robotics, where reliability and precision are non-negotiable. By focusing on signal polarity, magnetic encoders offer a straightforward yet powerful solution for motor direction monitoring.
In conclusion, encoder signal polarity is a key indicator of motor direction in magnetic encoders, providing a reliable and efficient method for motion control. By analyzing the sequence and timing of polarity transitions, engineers can accurately determine rotational direction, ensuring seamless operation in diverse applications. Whether in high-speed machinery or precision instruments, mastering this principle unlocks the full potential of magnetic encoders, making them indispensable tools in modern automation.
Can Dogs Safely Pass Magnets? Risks and What to Do
You may want to see also
Explore related products






![]()
Quadrature Encoding: Using A and B channels to determine direction in magnetic encoders
Magnetic encoders leverage quadrature encoding to determine motor direction with precision, relying on two output channels—A and B—that are 90 degrees out of phase. This phase difference is the cornerstone of direction detection. When the motor rotates, the A and B channels generate square waves, and their relative timing reveals the direction of motion. If channel A leads channel B, the motor moves in one direction; if B leads A, the direction is reversed. This simple yet effective principle forms the basis for accurate directional feedback in applications ranging from robotics to industrial automation.
To implement quadrature encoding, start by aligning the encoder’s A and B channels with the motor’s rotation. Ensure the encoder is mounted securely to avoid misalignment, which can introduce errors. Use a microcontroller or dedicated decoder IC to monitor the channels. Program the system to compare the phase relationship between A and B continuously. For example, if A transitions from low to high while B is high, the motor is moving forward; if B transitions first, it’s moving in reverse. Calibrate the system by performing a known rotation and verifying the detected direction to ensure accuracy.
One practical tip is to incorporate a third channel, often called the Z or index channel, to provide a reference point for absolute positioning. While not necessary for direction detection, it enhances the encoder’s functionality by allowing the system to identify the motor’s starting position. Additionally, filter the A and B signals to minimize noise, especially in high-speed applications where rapid transitions can introduce false readings. A simple RC filter or digital debouncing algorithm can significantly improve reliability.
Comparing quadrature encoding to other direction detection methods highlights its advantages. Unlike hall-effect sensors, which rely on discrete positions, quadrature encoding provides continuous feedback, enabling smoother control. It also outperforms methods like back EMF sensing, which are less accurate and more susceptible to environmental factors. However, quadrature encoding requires careful alignment and signal processing, making it less forgiving than simpler systems. For applications demanding precision and real-time feedback, its complexity is a worthwhile trade-off.
In conclusion, quadrature encoding using A and B channels is a robust solution for detecting motor direction in magnetic encoders. By understanding the phase relationship between the channels and implementing proper signal processing, engineers can achieve reliable and accurate directional feedback. Whether in precision machinery or consumer electronics, this technique ensures motors operate with the control and efficiency required for modern applications. Master its principles, and you’ll unlock a powerful tool for motion control systems.
Shooting Objects Through Magnetic Fields: Feasibility and Physics Explained
You may want to see also
Explore related products



$9.99



![]()
Magnetic Field Orientation: Detecting direction via changes in magnetic field alignment
Magnetic encoders leverage the principle that magnetic fields have distinct orientations, which can be precisely measured to determine the direction of motor rotation. When a motor rotates, the magnetic field generated by its components—such as a magnetized rotor or a series of magnetic poles—changes its alignment relative to the encoder’s sensors. These sensors, typically Hall effect or magnetoresistive devices, detect shifts in the magnetic field’s polarity or strength. For example, a bipolar magnet on a rotor will produce a field that alternates between north and south poles as it spins. By tracking these transitions, the encoder can infer whether the motor is rotating clockwise or counterclockwise.
To implement this method effectively, consider the following steps: First, ensure the magnet’s poles are symmetrically arranged to provide clear, repeatable signals. Second, position the sensors at precise intervals to capture field changes without ambiguity. For instance, placing sensors 90 degrees apart allows for accurate detection of both direction and position. Third, calibrate the system to account for environmental factors like temperature, which can affect magnetic properties. Practical tip: Use a multi-pole magnet with at least 12 poles for high-resolution detection in small motors, or fewer poles for larger, slower applications.
One critical aspect to analyze is the encoder’s ability to distinguish between noise and genuine direction changes. Magnetic fields are susceptible to interference from nearby ferromagnetic materials or electrical currents. To mitigate this, employ shielding materials like mu-metal around the encoder and filter algorithms in the signal processing circuitry. Comparative analysis shows that magnetoresistive sensors outperform Hall effect sensors in noisy environments due to their higher sensitivity and lower power consumption. However, Hall effect sensors are simpler to integrate and more cost-effective for basic applications.
A persuasive argument for using magnetic field orientation in direction detection is its robustness and simplicity. Unlike optical encoders, magnetic encoders are immune to dust, oil, and other contaminants, making them ideal for harsh industrial environments. Additionally, they require no physical contact between components, reducing wear and maintenance. For instance, in automotive applications, magnetic encoders are used in steering systems to detect rotation direction with high reliability, even in muddy or wet conditions. This durability translates to lower long-term costs and higher system uptime.
In conclusion, detecting motor direction via changes in magnetic field alignment is a precise and practical technique. By carefully arranging magnets and sensors, calibrating for environmental factors, and choosing the right sensor type, engineers can achieve reliable direction detection in diverse applications. Whether in robotics, automotive systems, or manufacturing machinery, magnetic encoders offer a robust solution that balances accuracy, durability, and cost-effectiveness. Practical tip: Regularly inspect magnets for demagnetization and sensors for drift to ensure consistent performance over time.
Laundry Magnets: Potential Risks to Your Washing Machine Explained
You may want to see also
Explore related products





![]()
Resolution Impact: How encoder resolution affects direction detection accuracy
Magnetic encoders, with their robust and non-contact design, are increasingly relied upon for motor direction detection in industrial and automotive applications. However, their accuracy in discerning direction hinges critically on resolution—the number of discrete positions the encoder can detect per revolution. Higher resolution translates to finer granularity, enabling the system to distinguish subtle changes in motor movement. For instance, a 12-bit encoder (4,096 positions per revolution) offers significantly more precise direction detection than an 8-bit encoder (256 positions), particularly at low speeds where positional changes are minimal.
Consider a scenario where a motor transitions from forward to reverse motion. At low speeds, a low-resolution encoder might fail to capture the direction change promptly, leading to lag or misinterpretation. In contrast, a high-resolution encoder detects the minute angular shifts almost instantaneously, ensuring accurate and timely direction feedback. This is particularly crucial in applications like robotics or CNC machining, where even minor discrepancies can result in costly errors or system failures.
The relationship between resolution and accuracy isn’t linear but exponential. Doubling the resolution quadruples the number of detectable positions, dramatically refining direction detection. For example, increasing from 1,000 to 2,000 counts per revolution (CPR) reduces the angular step size from 0.36° to 0.18°, halving the potential error in direction interpretation. However, this comes with trade-offs: higher resolution demands more sophisticated signal processing and can increase costs, making it essential to balance precision needs with practical constraints.
Practical implementation requires careful consideration of the application’s speed and load dynamics. For high-speed motors, even moderate resolution (e.g., 512 CPR) may suffice, as rapid movement naturally generates more distinct positional data. Conversely, low-speed or high-precision systems benefit from resolutions exceeding 4,096 CPR to capture minute directional changes. Pairing the encoder with a microcontroller capable of handling its output frequency is equally vital, as bottlenecks in data processing can negate the benefits of high resolution.
In summary, encoder resolution is a pivotal determinant of direction detection accuracy in magnetic encoders. While higher resolution enhances precision, especially at low speeds, it necessitates careful system design and resource allocation. By tailoring resolution to the specific demands of the application, engineers can optimize both performance and cost, ensuring reliable motor direction detection in diverse operational contexts.
Exploring the Link: Can Friction Generate Magnetic Properties?
You may want to see also
Explore related products



![]()
Direction Algorithms: Software methods to interpret encoder data for motor direction
Magnetic encoders, with their robust and non-contact design, are increasingly used to monitor motor position and speed. However, determining motor direction—whether it’s rotating clockwise or counterclockwise—requires more than raw encoder data. This is where direction algorithms come into play. These software methods interpret encoder signals to accurately deduce motor direction, ensuring precise control in applications like robotics, CNC machines, and automotive systems.
Steps to Implement Direction Algorithms:
- Capture Encoder Signals: Begin by reading the A and B channels of the magnetic encoder. These quadrature signals are phase-shifted by 90 degrees and provide the foundation for direction detection.
- Monitor Signal Edges: Track the rising and falling edges of the A and B channels. The order in which these edges occur (e.g., A leading B or B leading A) indicates the direction of rotation.
- Apply Edge Counting Logic: Use a state machine or edge-counting algorithm to compare the sequence of edges. For instance, if A leads B, the motor is moving in one direction; if B leads A, it’s moving in the opposite direction.
- Filter Noise: Implement debouncing or low-pass filtering to eliminate false edge detections caused by electrical noise or encoder jitter, ensuring reliable direction detection.
Cautions in Algorithm Design:
While direction algorithms are straightforward, they require careful calibration and testing. Misalignment in encoder installation or signal delays can lead to incorrect direction interpretation. Additionally, high-speed motors may introduce edge detection challenges, necessitating hardware interrupts or high-frequency sampling to capture signals accurately.
Practical Tips for Implementation:
- Use a microcontroller with hardware quadrature decoding capabilities to offload edge detection and reduce software overhead.
- Incorporate a direction pin or register in your motor control system to store and update the detected direction in real time.
- Test the algorithm under varying speeds and loads to ensure robustness across operating conditions.
Direction algorithms transform magnetic encoder data into actionable motor direction information, enabling precise control in dynamic systems. By following structured steps, addressing potential pitfalls, and applying practical tips, engineers can reliably detect motor direction, enhancing the performance and safety of encoder-based applications.
Can Kids Play with Magnets? Safety Tips for Magnetic Fun
You may want to see also
Frequently asked questions
Yes, magnetic encoders can detect motor direction by analyzing the sequence of magnetic field changes from the encoder’s poles, distinguishing between clockwise and counterclockwise rotation.
Magnetic encoders determine direction by comparing the phase shift between multiple sensor channels (e.g., A and B channels), where the order of signals indicates the rotation direction.
Yes, magnetic encoders are suitable for bidirectional motor control as they can accurately detect and report both forward and reverse motor movements.
No, magnetic encoders do not require additional components to detect motor direction; the direction is inherently determined by the encoder’s signal processing.
Yes, magnetic encoders can detect motor direction even at low speeds or during reversals, provided the encoder resolution and signal processing are sufficient for the application.


















