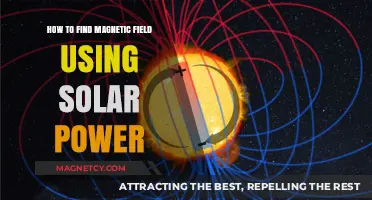
Understanding how to calculate torque using the magnetic moment of a loop is essential in the study of electromagnetism. When a current-carrying loop is placed in a magnetic field, it experiences a torque due to the interaction between the magnetic moment of the loop and the external field. The magnetic moment, defined as the product of the current, area of the loop, and a unit vector normal to the plane of the loop, plays a crucial role in determining this torque. By applying the formula τ = μ × B, where τ is the torque, μ is the magnetic moment, and B is the magnetic field vector, one can quantitatively analyze the rotational force exerted on the loop. This principle is fundamental in various applications, including electric motors, galvanometers, and magnetic resonance imaging (MRI) systems.
| Characteristics | Values |
|---|---|
| Formula for Torque (τ) | τ = μ × B = μB sin(θ) |
| Magnetic Moment (μ) | μ = I * A * n |
| Current (I) | Amperes (A) |
| Area of Loop (A) | Square meters (m²) |
| Number of Turns (n) | Unitless (integer) |
| Magnetic Field (B) | Teslas (T) |
| Angle (θ) | Angle between magnetic moment and magnetic field (radians or degrees) |
| Direction of Torque | Perpendicular to both μ and B, following right-hand rule |
| Units of Torque (τ) | Newton-meters (N·m) |
| Applicability | Uniform magnetic field, rigid current loop |
| Key Assumption | Magnetic field is constant over the loop |
| Physical Interpretation | Torque tends to align the magnetic moment with the magnetic field |
Explore related products






What You'll Learn
- Understanding Magnetic Moment: Define magnetic moment as a measure of a loop's tendency to align with a magnetic field
- Torque Formula Derivation: Derive torque formula using magnetic moment, magnetic field strength, and angle between them
- Current and Area Role: Explain how current and loop area contribute to the magnetic moment calculation
- Direction of Torque: Determine torque direction using the right-hand rule and magnetic field orientation
- Practical Applications: Apply torque calculation in devices like electric motors and galvanometers using magnetic moments
![]()
Understanding Magnetic Moment: Define magnetic moment as a measure of a loop's tendency to align with a magnetic field
Magnetic moment is a fundamental property that quantifies a loop's inherent desire to orient itself within a magnetic field. Imagine a tiny compass needle: its magnetic moment dictates how strongly it aligns with the Earth's magnetic field. Similarly, for a current-carrying loop, its magnetic moment determines its interaction with external magnetic fields. This vector quantity, measured in ampere-square meters (A·m²), points in the direction normal to the loop's plane, following the right-hand rule. The larger the magnetic moment, the greater the loop's tendency to align with the field lines.
To understand its role in torque calculation, consider a loop placed in a uniform magnetic field. The magnetic moment acts like a tiny magnet, experiencing a force that tries to align it with the field. This force generates a torque, a rotational force that tends to twist the loop into alignment. The magnitude of this torque is directly proportional to both the magnetic moment's strength and the magnetic field's intensity. Mathematically, torque (τ) equals the cross product of the magnetic moment (μ) and the magnetic field (B): τ = μ × B. This equation highlights the vector nature of both moment and torque, emphasizing their directional relationship.
Visualize a circular loop carrying current I, with area A and N turns. Its magnetic moment (μ) equals NIA, where the direction is perpendicular to the loop's plane. When placed in a magnetic field B, the torque (τ) becomes τ = NIAB sin(θ), where θ is the angle between μ and B. This formula reveals that torque is maximized when the loop is perpendicular to the field (θ = 90°) and zero when aligned (θ = 0°). This behavior mirrors the compass needle's alignment, illustrating the magnetic moment's role in dictating the loop's orientation.
Understanding magnetic moment as a measure of alignment tendency is crucial for practical applications. For instance, in electric motors, loops with larger magnetic moments experience stronger torques, enhancing rotational efficiency. Conversely, in sensitive magnetic sensors, controlling the loop's magnetic moment allows precise detection of field changes. By manipulating the current, number of turns, or loop area, engineers can tailor the magnetic moment to optimize device performance. This principle underpins technologies from hard drives to MRI machines, showcasing the magnetic moment's central role in magnetism.
Magnets in Lasers: Unveiling Their Role in Modern Technology
You may want to see also
Explore related products




![]()
Torque Formula Derivation: Derive torque formula using magnetic moment, magnetic field strength, and angle between them
The torque experienced by a current-carrying loop in a magnetic field is a fundamental concept in electromagnetism, directly tied to the loop's magnetic moment. This torque arises from the interaction between the magnetic moment vector and the external magnetic field. Understanding how to derive the torque formula using these parameters is crucial for analyzing systems like electric motors, galvanometers, and magnetic resonance imaging (MRI) equipment.
Let's break down the derivation step by step.
Step 1: Understanding the Components
- Magnetic Moment (μ): This vector quantity represents the loop's tendency to align with a magnetic field. It's calculated as the product of the current (I) flowing through the loop, the area (A) enclosed by the loop, and a unit vector (ñ) perpendicular to the loop's plane: μ = I A ñ.
- Magnetic Field (B): This vector represents the strength and direction of the external magnetic field.
- Angle (θ): This is the angle between the magnetic moment vector (μ) and the magnetic field vector (B).
Step 2: The Torque Formula
The torque (τ) experienced by the loop is directly proportional to both the magnetic moment (μ) and the magnetic field strength (B), and it depends on the sine of the angle (θ) between them. Mathematically, this relationship is expressed as:
Τ = μ * B * sin(θ)
Step 3: Physical Interpretation
This formula reveals that the torque is maximized when the magnetic moment is perpendicular to the magnetic field (θ = 90°), resulting in sin(θ) = 1. Conversely, when the magnetic moment aligns parallel or antiparallel to the field (θ = 0° or 180°), sin(θ) = 0, and no torque is experienced.
This principle underlies the operation of devices like electric motors, where the torque generated by the interaction of magnetic fields drives rotational motion.
Practical Considerations:
- Units: Ensure consistent units for magnetic moment (A·m²), magnetic field (Tesla), and torque (Newton-meters).
- Direction: The direction of the torque vector follows the right-hand rule. If you curl your right hand fingers along the direction of the current in the loop, your thumb points in the direction of the torque.
- Applications: This formula is essential for calculating the torque on current loops in various applications, from designing electromagnets to understanding the behavior of particles in magnetic fields.
Neodymium Magnets in Generators: Power Potential and Practical Applications
You may want to see also
Explore related products






![]()
Current and Area Role: Explain how current and loop area contribute to the magnetic moment calculation
The magnetic moment of a current loop is a fundamental concept in electromagnetism, directly tied to the torque it experiences in a magnetic field. At its core, the magnetic moment (μ) is calculated as the product of the current (I) flowing through the loop and the area (A) enclosed by the loop, multiplied by a constant factor: μ = I * A. This equation reveals the linear relationship between current, area, and magnetic moment, but the interplay between these variables is more nuanced than a simple multiplication.
Consider the role of current first. Current represents the flow of charge, and its magnitude directly influences the strength of the magnetic field generated by the loop. A higher current produces a stronger magnetic field, thereby increasing the magnetic moment. For instance, doubling the current through a loop will double its magnetic moment, assuming the area remains constant. This linear relationship is critical in applications like electromagnets, where adjusting the current allows precise control over the magnetic force. However, increasing current also raises energy consumption and heat dissipation, which must be managed in practical designs.
Area, the second critical factor, determines the spatial extent of the loop's magnetic influence. A larger loop area captures more magnetic flux, enhancing the interaction with external magnetic fields. For example, a circular loop with a radius of 0.1 meters has an area of approximately 0.0314 m², while doubling the radius to 0.2 meters increases the area to 0.1257 m², significantly boosting the magnetic moment. However, larger loops are less practical in compact devices due to size constraints. Engineers often optimize loop geometry (e.g., rectangular or solenoidal shapes) to maximize area within limited spaces while maintaining structural integrity.
The combined effect of current and area highlights their interdependence in magnetic moment calculations. For a given loop, increasing both current and area yields a multiplicative effect on the magnetic moment. For instance, a loop with 2 A current and 0.01 m² area has a magnetic moment of 0.02 A·m². Increasing the current to 4 A and the area to 0.02 m² results in a magnetic moment of 0.08 A·m², a fourfold increase. This synergy is exploited in devices like MRI machines, where high currents and large coils are used to generate strong, uniform magnetic fields.
In practical applications, balancing current and area is essential. High currents require robust conductors and cooling systems, while large areas demand more material and space. For example, in a small DC motor, a loop with 1 A current and 0.005 m² area might suffice, but in a particle accelerator, currents exceeding 100 A and loop areas of several square meters are common. Understanding this trade-off enables engineers to tailor designs for specific torque requirements, ensuring efficiency and feasibility.
Unlocking Secrets: Can Magnets Really Open Padlocks?
You may want to see also
Explore related products






![]()
Direction of Torque: Determine torque direction using the right-hand rule and magnetic field orientation
The direction of torque on a current-carrying loop in a magnetic field is a critical aspect of understanding electromagnetic interactions. To determine this direction, the right-hand rule serves as an indispensable tool. This rule leverages the relationship between the magnetic moment of the loop, the magnetic field, and the resulting torque, providing a clear and intuitive method for prediction. By aligning your right hand with the loop's magnetic moment and the external magnetic field, you can instantly deduce the torque's orientation.
Application of the Right-Hand Rule:
Hold your right hand with your thumb, index finger, and middle finger mutually perpendicular. Point your index finger along the direction of the magnetic field lines (from north to south). Align your middle finger in the direction of the magnetic moment of the loop, which is perpendicular to the plane of the loop and follows the right-hand grip rule (curling your fingers around the loop with your thumb pointing to the moment). Your thumb will then point in the direction of the torque, indicating the axis around which the loop tends to rotate. This method ensures accuracy and consistency in determining torque direction under various orientations of the loop and magnetic field.
Practical Example and Analysis:
Consider a circular loop carrying current in a clockwise direction when viewed from above, placed in a uniform magnetic field pointing upward. Using the right-hand rule: the index finger points up (magnetic field), the middle finger points outward (magnetic moment, perpendicular to the loop), and the thumb points to the right. This indicates the torque will cause the loop to rotate counterclockwise when viewed from above. Analyzing this example highlights how the rule simplifies complex vector relationships into a straightforward physical action.
Cautions and Considerations:
While the right-hand rule is powerful, its effectiveness depends on precise application. Common errors include misaligning fingers with the magnetic field or magnetic moment, leading to incorrect torque direction. Always verify the orientation of both the field and the loop's moment before applying the rule. Additionally, ensure the loop's plane is clearly defined, as ambiguity here can skew results. For non-uniform magnetic fields, the rule applies locally but may require adjustments for overall torque calculation.
Mastering the right-hand rule for torque direction is essential for both theoretical understanding and practical applications in electromagnetism. Its simplicity belies its utility, enabling quick predictions in scenarios ranging from electric motors to magnetic resonance imaging. By internalizing this method and practicing with diverse configurations, you’ll develop an intuitive sense for how magnetic moments and fields interact, streamlining problem-solving in both academic and real-world contexts.
Magnetic Screen Doors in Restaurants: Practicality and Benefits Explored
You may want to see also
Explore related products






![]()
Practical Applications: Apply torque calculation in devices like electric motors and galvanometers using magnetic moments
Electric motors and galvanometers are prime examples of devices where torque calculation using magnetic moments is not just theoretical but essential for functionality. In an electric motor, the torque generated by the interaction between the magnetic moment of a current-carrying loop and an external magnetic field determines the motor's ability to perform work. The magnetic moment (\(\mu = I A\)), where \(I\) is the current and \(A\) is the area of the loop, aligns with the field to produce a torque (\(\tau = \mu \times B\)), where \(B\) is the magnetic field strength. This principle allows motors to convert electrical energy into mechanical motion, powering everything from household appliances to industrial machinery.
Consider the galvanometer, a device used to detect and measure small electric currents. Its operation relies on the torque exerted on a current-carrying coil in a magnetic field. The coil’s magnetic moment interacts with the field, causing it to deflect proportionally to the current. By calculating the torque (\(\tau = I A B \sin\theta\)), where \(\theta\) is the angle between the magnetic moment and the field, engineers can design galvanometers with precise sensitivity and accuracy. For instance, a galvanometer with a coil area of \(0.01 \, \text{m}^2\) and a current of \(1 \, \text{mA}\) in a \(0.5 \, \text{T}\) field will experience a torque of \(5 \times 10^{-6} \, \text{N·m}\) when \(\theta = 90^\circ\), enabling it to measure currents as low as microamps.
To apply torque calculations effectively in these devices, follow these steps: First, determine the magnetic moment of the loop by measuring the current and area. Second, identify the external magnetic field strength and its orientation relative to the loop. Third, use the torque formula to compute the rotational force. For electric motors, ensure the torque matches the load requirements; for galvanometers, calibrate the deflection mechanism based on the calculated torque. Caution: In motors, excessive torque can lead to overheating, while in galvanometers, misalignment of the magnetic field can reduce sensitivity.
Comparing electric motors and galvanometers highlights the versatility of torque calculations. Motors prioritize high torque for efficient power transmission, often using multiple loops or laminated cores to enhance magnetic moments. Galvanometers, on the other hand, require precise, low-torque measurements, demanding fine-tuned coil designs and uniform magnetic fields. Both applications underscore the importance of understanding magnetic moments in optimizing device performance.
In practice, engineers often use simulation tools like Finite Element Analysis (FEA) to model magnetic fields and torque distributions in motors and galvanometers. For instance, a motor designed for a \(10 \, \text{N·m}\) torque output might require a coil with a \(0.1 \, \text{m}^2\) area carrying a \(100 \, \text{A}\) current in a \(1 \, \text{T}\) field. Similarly, a galvanometer aiming for microamp sensitivity might use a \(0.001 \, \text{m}^2\) coil with a \(1 \, \text{mA}\) current in a \(0.2 \, \text{T}\) field. These calculations ensure devices meet operational requirements while minimizing energy loss and maximizing efficiency.
Magnets in Everyday Life: Unseen Forces Shaping Modern Convenience
You may want to see also
Frequently asked questions
The torque (τ) experienced by a current loop in a magnetic field is directly proportional to the magnetic moment (μ) of the loop and the external magnetic field (B). The relationship is given by the equation: τ = μ × B, where × denotes the cross product.
The magnetic moment (μ) of a current loop can be calculated using the formula: μ = I * A, where I is the current flowing through the loop and A is the area vector of the loop. The direction of A is perpendicular to the plane of the loop, following the right-hand rule.
Yes, if you know the magnetic moment (μ) and the magnetic field strength (B), you can find the torque (τ) using the formula: τ = μ × B. Ensure that both μ and B are in vector form, and the result will be a vector representing the torque, with its direction given by the right-hand rule.