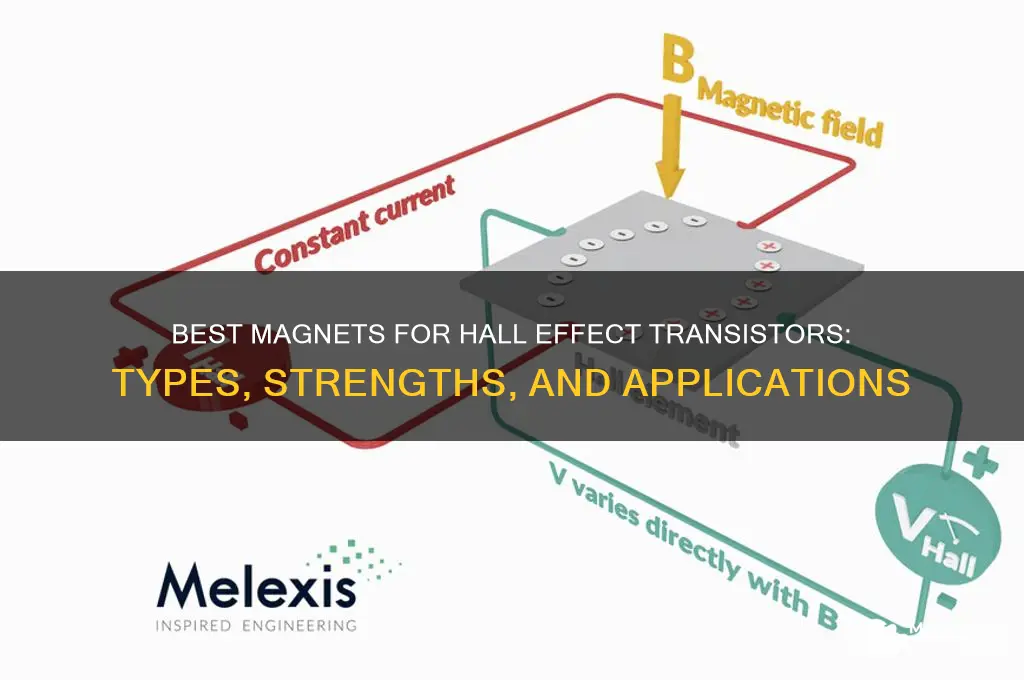
When selecting magnets to use with Hall effect transistors, it is crucial to consider the magnetic field strength, polarity, and material properties to ensure optimal performance. Hall effect transistors rely on the presence of a magnetic field to modulate their output, making the choice of magnet a critical factor in achieving accurate and reliable results. Ferrite and neodymium magnets are commonly used due to their strong magnetic fields and stability, with neodymium offering higher strength but at a greater cost. The magnet's orientation relative to the Hall effect sensor must also be carefully aligned to maximize sensitivity and minimize interference. Additionally, temperature stability and the magnet's physical size should be evaluated to match the specific application requirements, ensuring consistent operation across varying environmental conditions.
| Characteristics | Values |
|---|---|
| Magnet Type | Neodymium (NdFeB), Samarium-Cobalt (SmCo), Alnico, Ceramic (Ferrite) |
| Magnetic Field Strength (B) | Typically 50-500 Gauss (0.005-0.05 Tesla) for common Hall effect sensors. Check sensor datasheet for specific range. |
| Magnet Orientation | Polarity (North/South) matters. Align magnet poles perpendicular to the Hall effect sensor's active area for maximum sensitivity. |
| Magnet Size and Shape | Depends on sensor size and desired magnetic field strength. Smaller magnets require closer proximity to the sensor. Common shapes: Disc, Cylinder, Block. |
| Temperature Stability | Choose magnets with low temperature coefficients to maintain consistent magnetic field strength over operating temperature range. |
| Cost | Neodymium: Most expensive but strongest. Samarium-Cobalt: Expensive, good temperature stability. Alnico: Moderate cost, lower strength. Ceramic: Least expensive, weakest. |
| Corrosion Resistance | Neodymium and Samarium-Cobalt require coating for corrosion protection. Alnico and Ceramic are more resistant. |
| Mechanical Strength | Consider magnet brittleness, especially for applications with vibration or shock. |
Explore related products






What You'll Learn
- Bipolar vs. Unipolar Magnets: Choose based on Hall effect sensor's polarity detection requirements and application needs
- Magnet Strength (Gauss): Match magnet strength to sensor sensitivity for accurate and reliable readings
- Magnet Orientation: Align magnet poles correctly to ensure proper sensor activation and signal output
- Magnet Size and Shape: Select dimensions and form factor to fit sensor placement and space constraints
- Temperature Stability: Use magnets with stable performance across operating temperatures to avoid sensor drift
![]()
Bipolar vs. Unipolar Magnets: Choose based on Hall effect sensor's polarity detection requirements and application needs
Hall effect sensors rely on magnetic fields to detect proximity, position, or current, making magnet selection critical for accurate performance. The choice between bipolar and unipolar magnets hinges on the sensor's polarity detection capabilities and the application's specific demands. Bipolar magnets, with both north and south poles on opposite faces, generate a field that transitions from positive to negative as the magnet moves across the sensor. This characteristic suits applications requiring detection of both polarities, such as bidirectional current sensing or position tracking in systems where the magnet's orientation changes. For instance, in automotive applications, bipolar magnets paired with Hall effect sensors can monitor crankshaft position by detecting the alternating magnetic field as the magnet rotates.
Unipolar magnets, in contrast, have a single pole facing the sensor, producing a field that remains either positive or negative. This simplicity makes them ideal for applications needing detection of a single polarity, such as proximity sensing or end-stop detection in linear actuators. For example, in a door sensor, a unipolar magnet can trigger a Hall effect switch when the door is closed, ensuring the sensor only responds to the magnet's approach from one direction. Unipolar magnets are also cost-effective for applications where bidirectional detection is unnecessary, reducing complexity and potential for error.
When selecting between bipolar and unipolar magnets, consider the sensor's polarity detection range and the application's environmental conditions. Bipolar magnets require precise alignment to ensure the sensor accurately interprets the field transition, making them less forgiving in systems with mechanical tolerances. Unipolar magnets, however, offer greater flexibility in positioning but may require stronger magnetic fields to achieve reliable detection at larger distances. For instance, in a brushless DC motor, a bipolar magnet ensures accurate commutation by detecting both north and south poles, while a unipolar magnet might suffice for a simple speed sensor.
Practical tips include testing magnet-sensor pairs under real-world conditions to verify detection thresholds and hysteresis. For bipolar magnets, ensure the sensor's polarity detection range matches the magnet's field strength and transition characteristics. In applications with vibration or misalignment, consider using unipolar magnets with higher flux density to maintain detection reliability. Always consult the Hall effect sensor's datasheet for recommended magnetic field strengths and polarity requirements, as these parameters vary widely between devices.
In conclusion, the choice between bipolar and unipolar magnets depends on the Hall effect sensor's polarity detection needs and the application's operational constraints. Bipolar magnets excel in bidirectional detection scenarios, while unipolar magnets simplify single-polarity applications. By aligning magnet selection with sensor capabilities and environmental factors, engineers can optimize performance, reduce costs, and ensure robust operation in diverse systems.
How MRI Machines Utilize Powerful Magnets for Medical Imaging
You may want to see also
Explore related products






![]()
Magnet Strength (Gauss): Match magnet strength to sensor sensitivity for accurate and reliable readings
Selecting the right magnet strength, measured in Gauss, is critical for ensuring Hall effect transistors deliver accurate and reliable readings. A mismatch between magnet strength and sensor sensitivity can lead to false triggers, missed detections, or erratic behavior in applications like proximity sensing, speed detection, or current measurement. For instance, a magnet too weak may fail to activate the sensor at the desired distance, while one too strong could saturate the sensor, causing it to remain permanently triggered. Understanding the sensor’s rated operating point (BOP) and release point (BRP) is essential, as these values dictate the magnetic field range within which the sensor operates predictably.
To achieve optimal performance, start by consulting the Hall effect sensor’s datasheet to identify its sensitivity range, typically specified in Gauss or Tesla. For example, a sensor with a BOP of 20 Gauss and a BRP of 10 Gauss requires a magnet that produces a field strength within this range at the operating distance. Use a Gaussmeter to measure the magnetic field at the sensor’s location, ensuring it aligns with the sensor’s specifications. If the field strength is too high, consider increasing the distance between the magnet and sensor or selecting a weaker magnet. Conversely, if the field is too weak, move the magnet closer or choose a stronger one.
Practical applications often involve trade-offs. In automotive systems, for instance, a Hall effect sensor detecting gear position might require a magnet strong enough to ensure reliable readings even with mechanical vibrations or misalignments. However, excessive strength could interfere with nearby sensors or components. In such cases, a neodymium magnet, known for its high strength-to-size ratio, might be ideal, but its placement and orientation must be carefully calibrated. For low-power or battery-operated devices, weaker ceramic or ferrite magnets may suffice, reducing energy consumption while maintaining functionality.
A comparative analysis of magnet types highlights the importance of matching strength to application needs. Neodymium magnets, with field strengths up to 14,000 Gauss, are overkill for most Hall effect sensors but excel in high-demand scenarios like industrial automation. Samarium-cobalt magnets, though less common, offer stability at high temperatures, making them suitable for harsh environments. Ferrite magnets, with strengths around 3,000 Gauss, are cost-effective for consumer electronics, while alnico magnets, at 1,500 Gauss, are ideal for legacy systems requiring retrofitting. Each material’s strength profile must align with the sensor’s sensitivity to avoid inefficiency or failure.
In conclusion, precise magnet strength selection is a balancing act between sensor sensitivity, application demands, and environmental factors. By measuring field strength, understanding sensor thresholds, and choosing the appropriate magnet material, engineers can ensure Hall effect transistors perform reliably in diverse scenarios. Whether optimizing for cost, durability, or precision, the key lies in aligning Gauss values with operational requirements, transforming potential pitfalls into opportunities for innovation.
Enhance Wellness: Acupressure Mat with Magnetic Pyramids Guide
You may want to see also
Explore related products






![]()
Magnet Orientation: Align magnet poles correctly to ensure proper sensor activation and signal output
Proper magnet orientation is critical when using Hall effect transistors (HETs) to ensure accurate sensor activation and reliable signal output. Misalignment of the magnet's poles relative to the sensor can lead to erratic behavior, reduced sensitivity, or complete failure of the system. The Hall effect relies on the interaction between a magnetic field and a current-carrying conductor, and the orientation of the magnetic field directly influences the output voltage of the transistor. Therefore, precise alignment is not just a best practice—it’s a necessity for functionality.
To achieve correct magnet orientation, start by identifying the sensor's sensitive axis, typically indicated in the datasheet or marked on the device itself. Align the magnet's poles perpendicular to this axis, ensuring the magnetic field lines pass directly through the Hall effect element. For example, if using a cylindrical magnet, position the north pole facing the sensor for a positive output or the south pole for a negative output, depending on the application requirements. This alignment maximizes the magnetic flux density detected by the sensor, optimizing its performance.
One common mistake is assuming that any orientation will suffice as long as the magnet is nearby. However, even slight deviations from the optimal alignment can significantly degrade the sensor's response. For instance, tilting a magnet by just 15 degrees relative to the sensitive axis can reduce the magnetic field strength by up to 30%, leading to inconsistent readings. To avoid this, use mechanical fixtures or adhesives to secure the magnet in place, ensuring it remains aligned during operation. Calibration tools, such as a gaussmeter, can also verify the magnetic field strength and orientation before finalizing the setup.
In applications requiring dynamic movement, such as rotary encoders or linear actuators, maintaining magnet orientation becomes more challenging. Here, the magnet's poles must remain consistently aligned with the sensor's axis as it moves. One solution is to use a magnet holder with a precision bearing or a guided rail system to constrain the magnet's motion. Additionally, consider using multipole magnets or arrays to create a more uniform magnetic field, reducing the impact of minor misalignments. Regularly inspect the system for wear or displacement, as mechanical stress can alter the magnet's position over time.
Finally, while correct orientation is essential, it’s equally important to select a magnet with appropriate strength and size for the specific Hall effect transistor. A magnet that is too weak may not activate the sensor, while one that is too strong can saturate it, leading to distorted readings. Pairing the right magnet with precise orientation ensures the sensor operates within its linear range, delivering consistent and accurate results. By combining these principles, designers can harness the full potential of Hall effect transistors in their applications.
Mastering the Magnetic Lasso Tool: A Step-by-Step Guide for Precision Selections
You may want to see also
Explore related products






![]()
Magnet Size and Shape: Select dimensions and form factor to fit sensor placement and space constraints
The size and shape of a magnet are critical factors when pairing it with a Hall effect transistor, as they directly influence the sensor's performance and the overall system design. A magnet that is too large may introduce unwanted magnetic fields, while one that is too small might not provide sufficient flux density for accurate sensing. For instance, in automotive applications, where Hall effect sensors are commonly used for position and speed detection, the magnet must fit within the confined space of a wheel hub or crankshaft without interfering with other components. Here, a cylindrical magnet with a diameter of 5 mm and a height of 2 mm might be ideal, offering a compact form factor while maintaining the necessary magnetic strength.
When selecting magnet dimensions, consider the sensor's sensitivity and the required air gap between the magnet and the Hall effect transistor. A smaller air gap generally allows for a smaller magnet, but this must be balanced against practical assembly constraints. For example, in consumer electronics like smartphones, where space is at a premium, a thin, rectangular magnet (e.g., 3 mm x 1 mm x 0.5 mm) can be used to detect cover openings or hinge positions without adding bulk. However, ensure the magnet's orientation aligns with the sensor's active area to maximize efficiency.
Shape plays a pivotal role in optimizing magnetic field alignment and minimizing interference. Circular or ring-shaped magnets are often preferred for rotational sensing applications, as they provide a uniform field around the sensor. In contrast, rectangular or bar magnets are suitable for linear motion detection, where the field needs to be concentrated along a specific axis. For instance, in a linear actuator, a 10 mm x 2 mm x 1 mm bar magnet can be positioned parallel to the sensor to ensure consistent detection of movement.
Practical tips include using simulation tools to model the magnetic field distribution before finalizing the magnet size and shape. This can help identify potential issues like field asymmetry or inadequate flux density. Additionally, consider the material's magnetic properties; neodymium magnets, for example, offer high strength in small sizes but are more susceptible to demagnetization at elevated temperatures. For high-temperature environments, samarium-cobalt magnets, though larger, may be a better choice.
In summary, selecting the right magnet size and shape involves a careful balance of sensor requirements, space constraints, and environmental conditions. By tailoring these parameters to the specific application, designers can ensure optimal performance and reliability of Hall effect transistor-based systems. Whether it’s a compact cylindrical magnet for automotive use or a thin rectangular one for portable devices, the goal is to achieve precise sensing without compromising on design efficiency.
Magnetic Glow: Illuminating LEDs with Magnetic Power
You may want to see also
Explore related products






![]()
Temperature Stability: Use magnets with stable performance across operating temperatures to avoid sensor drift
Magnetic materials exhibit varying responses to temperature changes, a critical factor when selecting magnets for Hall effect transistors. Ferromagnetic materials like iron, nickel, and cobalt experience a decrease in magnetization as temperature rises due to increased thermal agitation disrupting the alignment of magnetic domains. This phenomenon, known as Curie's Law, can lead to significant sensor drift in Hall effect applications. For instance, a neodymium magnet, while powerful, may lose up to 10% of its magnetization when operating at temperatures exceeding 80°C, rendering it unsuitable for high-temperature environments.
To mitigate temperature-induced sensor drift, prioritize magnets with high Curie temperatures and low thermal coefficients of magnetization. Samarium-cobalt (SmCo) magnets, for example, maintain their magnetic properties up to 300°C, making them ideal for automotive and industrial applications where temperatures can fluctuate widely. Alnico magnets, though less powerful, offer excellent temperature stability up to 500°C, albeit with a lower magnetic field strength. When selecting a magnet, consult its temperature coefficient of magnetization, typically expressed as a percentage change per degree Celsius. Aim for values below 0.1% per °C to ensure minimal drift.
In applications requiring both high magnetic strength and temperature stability, consider hybrid solutions or specialized magnet designs. For instance, combining a high-temperature-resistant material like SmCo with a heat-dissipating structure can enhance overall performance. Additionally, incorporate thermal management strategies such as heat sinks or active cooling systems to maintain the magnet within its optimal operating temperature range. Regularly calibrate the Hall effect sensor to account for any residual drift, especially in critical applications like position sensing or current measurement.
A comparative analysis of magnet materials reveals that while neodymium offers the highest magnetic strength at room temperature, its performance degrades rapidly with heat. In contrast, ceramic (ferrite) magnets, though weaker, exhibit better stability up to 250°C, making them a cost-effective choice for moderate-temperature applications. Ultimately, the selection should align with the specific temperature profile of the application, balancing magnetic strength, stability, and cost. By prioritizing temperature stability, engineers can ensure reliable and accurate performance of Hall effect transistors across diverse operating conditions.
Magnetic Migrants: Animals Navigating Earth’s Invisible Compass for Travel
You may want to see also
Frequently asked questions
Neodymium magnets (NdFeB) are typically the best choice due to their strong magnetic field strength, which ensures reliable and consistent operation of Hall effect transistors.
Yes, ceramic magnets (ferrite magnets) can be used, but they are less ideal due to their weaker magnetic field compared to neodymium magnets. They may require closer proximity to the sensor for proper operation.
Yes, the polarity of the magnet matters because Hall effect transistors detect changes in magnetic field direction. Ensure the magnet's orientation aligns with the sensor's requirements for accurate detection.